
About Me
I am Mechanical Engineering Graduate Student at Northeastern University. My program concentration is in Mechatronics. I am also
actively working as a Biomechanics Research Assistant at the NeuMove
Lab, under the supervision of its Principal Investigator, Dr.
Seungmoon Song. My interest for Mechatronics comes from the desire to find and implement programming appliations
in the field of Mechanical Engineering, to improve performance, collect & analyze data, and save time,
which I believe is the future of other fields too.
Through my academic projects and ongoing research, I have worked with interfacing sensors to get desired output
and also to detect anomalies in systems. My current task of working with Exoskeletons and Programmable Treadmill
has added great value to this experience. Furthermore, I have written Python Scripts to create GUI as well as to
analyze, resample, filter and label output data of hardware systems. I aspire to be a Mechatronics Engineer,
to help design assistive devices and implement programming logic in systems used in our daily lives.
Education

M.S. in Mechanical Engineering (Mechatronics)
Northeastern University
2022-Present
Relevant Courses:
- Control Systems Engineering (ME 5659)
- Robot Mechanics & Control (ME 5250)
- Mechatronics Systems (ME 5245)
- Wearable Robotics (ME 7374)

B.Tech. in Mechanical Engineering
Fr. Conceicao Rodrigues Institute of Technology
2017-2021
➼ Aggregate: 8.52/10.0

Junior College Specialization in Electronics
S.I.E.S. College of Arts, Science & Commerce
2015-2017
➼ Aggregate: 75.85%

Secondary Education
St. Joseph's High School
2004-2015
➼ Aggregate: 85.60%
Technical Experience
Northeastern University
NeuMove Lab, Graduate Research Assistant
- Developing a Virtual Neuromusuclar Controller to command torque for assistive walking.
- Modified existing exoskeleton code architecture to execute as an emulator.
- Tuned Controller Parameter and PID Gains for optimal performance and to mimick human walking.
- Designed a position/torque control and current control experiment to validate commanded exoboot torque.
- Collaborated with research associate, for a short term, on implementing a self-pacing treadmill algorithm in MATLAB.
- Tested Achilles Tendon Sitffness on range of values to determine effect on ankle torque.
Northeastern University
Shepherd Lab, Graduate Research Assistant
- Developing a gait speed and slope estimation model to predict speeds from 0-2.5 m/s range with cross-subjects accuracy.
- Created an LSTM model and Regression model to test for accuracy in speed interpolation and extrapolation scenarios.
- Collaborating with research associate on developing RNN machine learning model to estimate gait phase.
- Innovated Python scirpts to read Mo-cap system and Treadmill data at 1.2 KHz frequency.
- Applied Low-Pass filters and resampled data to synchronize with exoskeleton data at 200 Hz.
- Established experimental protocol for exoskeleton data collection sessions with 10 test subjects using treadmill and Mo-cap equipment.
L&T Hydrocarbon Engg.
Mechanical Engineering Intern
- Analyzed functional detais of EPCI (Engineering, Procurement, Construction & Installation) of offshore sites in the Oil & Gas Industry.
- Demonstrated a case study on the working of Sump Caisson and recent advancements for its better functionality.
Bharat Petroleum Corp. Ltd.
Mechanical Engineering Intern
- Explored different types of pumps used in oil and gas refinery such as Submersible Pumps, Screw Pumps and Centrifugal Pumps.
- Completed a technical study on disassembly, maintenance operations and assembly of Submersible Sump Pumps.
- Gained firsthand experience of the operations by using the CNC machine at the refinery’s Engineering Workshop.
Projects
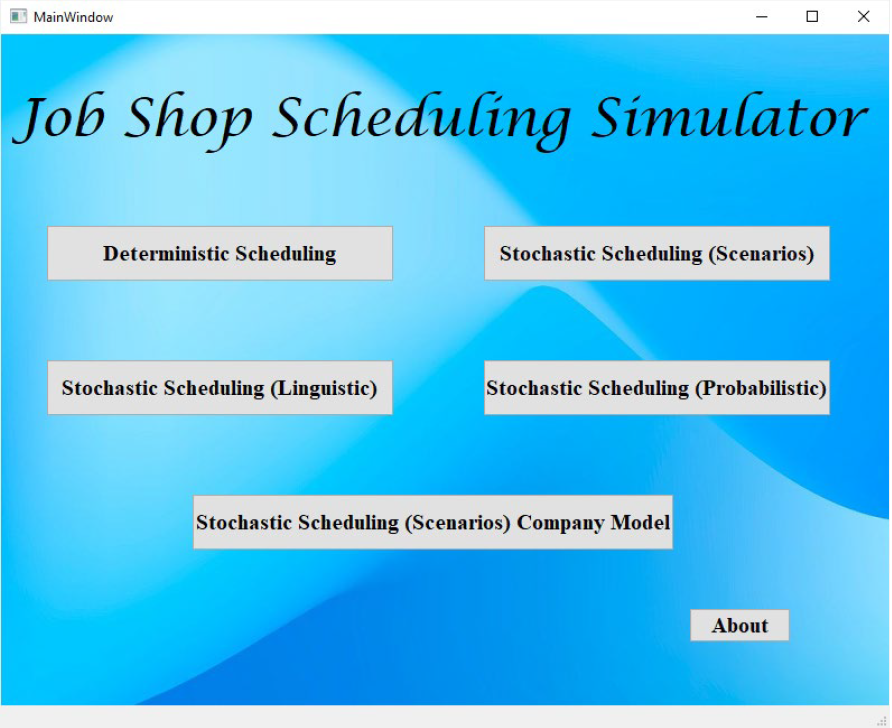
Simulation of Sequencing for Stochastic Scheduling in Job Shop
Innovated a simulation environment, consisting of 4 individual models, to perform Stochastic Scheduling of jobs for a manufacturing company.
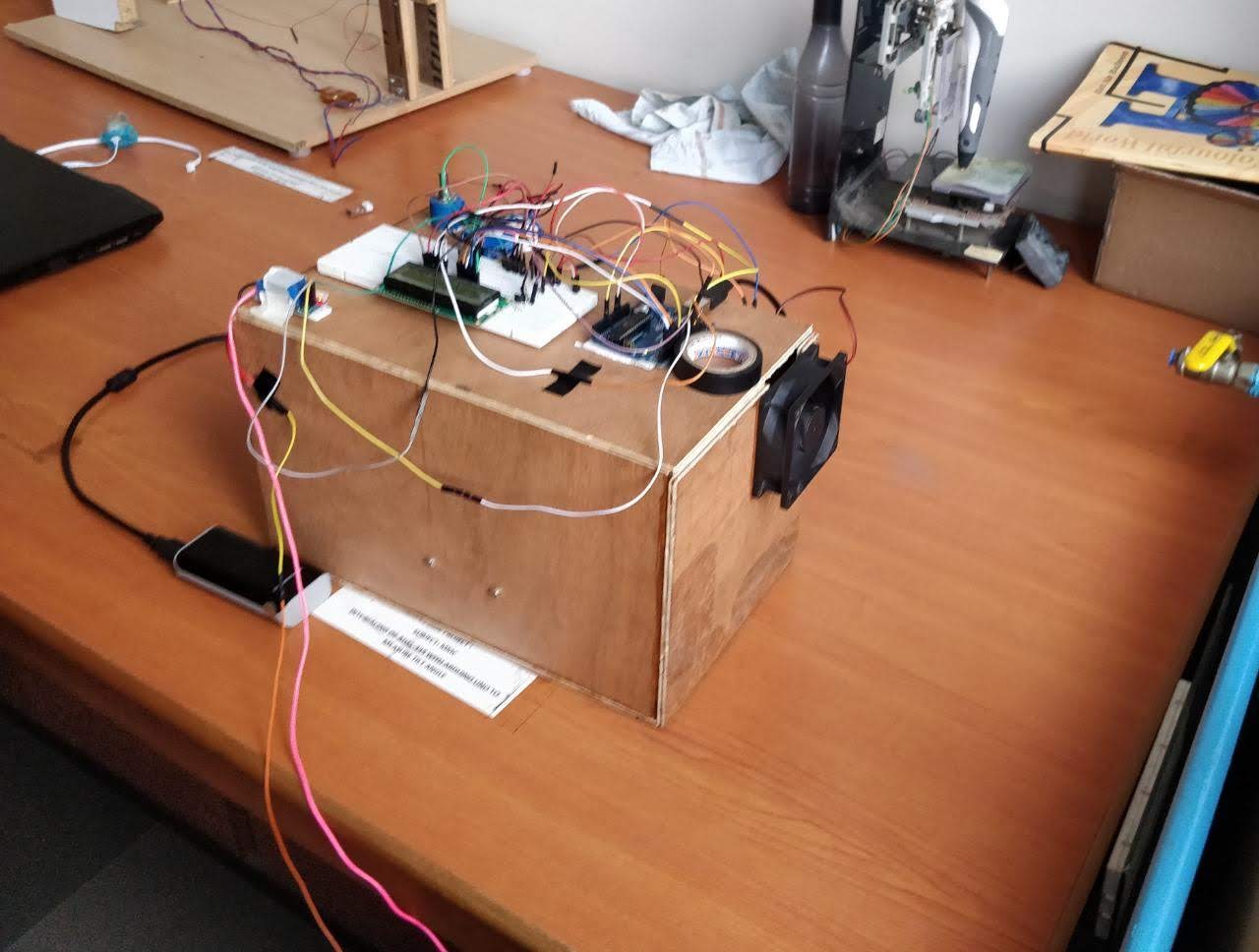
Temperature Control Inside a Closed Container
Develped a control unit using Arduino, Thermistor, Fan, Incandescent Bulb and PID Controller to maintain a fixed temperature range in a closed container.
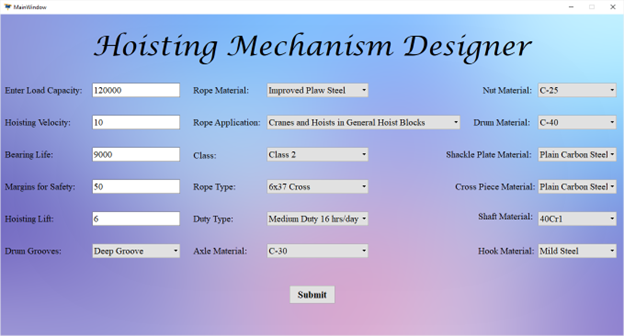
Application Software for Design of Hoisting Mechanism
Implemented a software for performing design calculations and analyzing stresses of all components in a hoisting mechanism. The developed algorithm modifies dimensions to avoid failure and provides specification of standard components to be used.
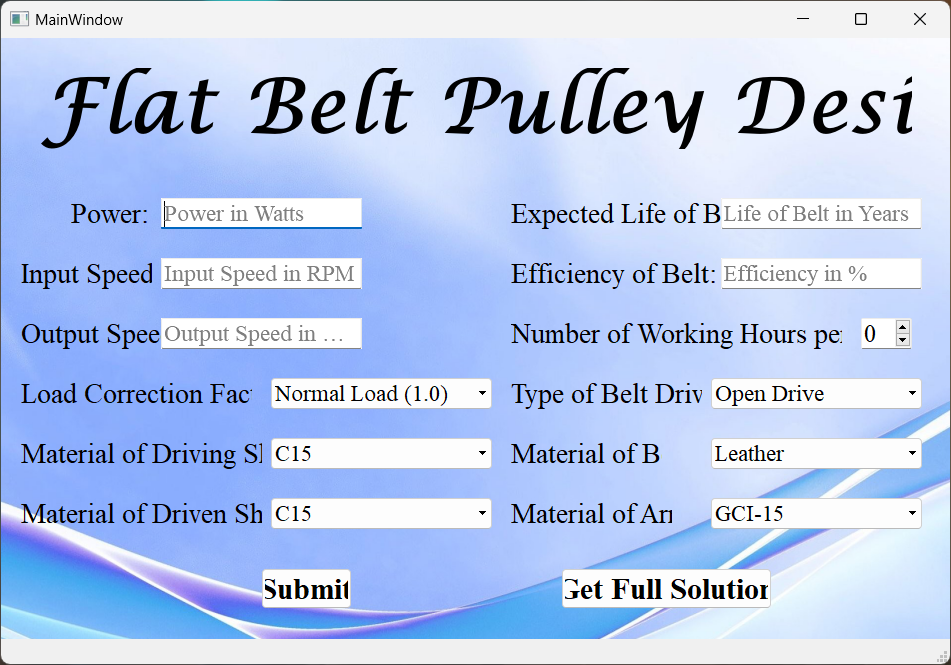
Application Software for Design of Flat Belt Pulley
Develped a software for performing design calculations for Flat Belt Pulley.The developed algorithm removes constraints on range of material selection alongside implementing Application Programming Interface (API) to provide complete design solution in Microsoft Word document.
Water Turbidity Detector and Filtration System
Built a filtration system using Turbidity sensor and Arduino microcontroller to remove sludge sedimentation and macro particles in water.
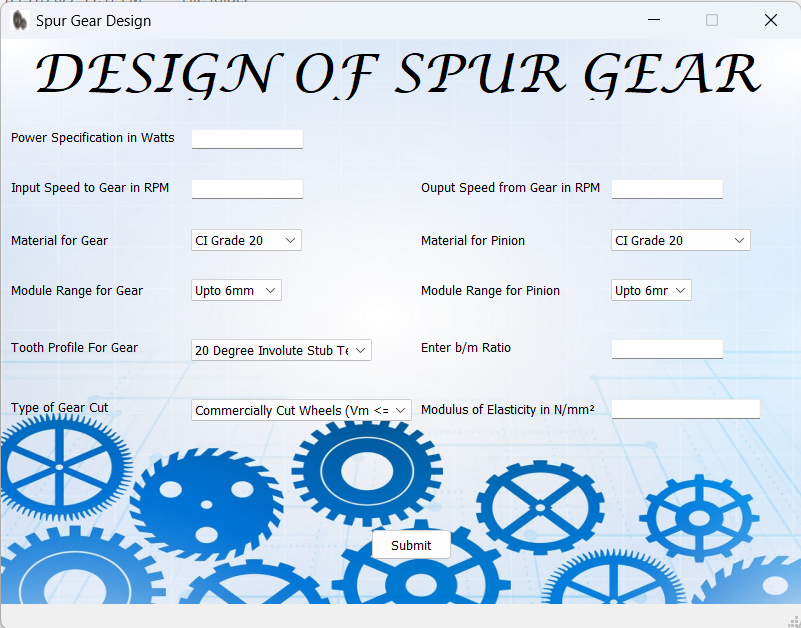
Application Software for Design of Spur Gear
Designed a software for performing design calcuations of a single stage spur gear. It provides the operator freedom to choose the material for individual components, tooth profile and type of gear cut.

Application Software for Design of Sliding Contact Bearings
Develped a software for performing the design calculations of application based hydrodynamic sliding contact bearing. The software provides output of all the non-dimensional performance parameters in the design.
Skills
Python (Libraries: NumPy, SciPy, TensorFlow, Pandas, PyQt5, OpenCV, Matplotlib)
CAD Packages (SolidWorks & Autodesk: AutoCAD, Inventor, Fusion 360)
Mircrocontrollers (Arduino, Raspberry Pi)
Web Development (HTML, CSS, JavaScript)
Documentation Tools (Microsoft: Word, Excel, PowerPoint, OneNote)
Simulation Software (ANSYS [Mechanical APDL and Workbench], MATLAB)
Other Programming Languages (XML, MySQL, C, GNU Octave)